Contents
P10.1 Inverted pendulum
clear variables
g=9.8;
disp('Sampling time:'), Ts=.1
A=[0 1; g 0]; B=[0; 1]; C=[1 0]; D=0;
IP=ss(A,B,C,D);
disp('Discrete-time model:')
IPz=c2d(IP,Ts);
Ad=IPz.a, Bd=IPz.b,
f1=@(x,u) Ad*x+Bd*u;
u=rand(1,10); x=rand(2,1);
for i=1:length(u), x(:,i+1)=f1(x(:,i),u(i)); end
y=C*x;
disp('Random input:'), disp(u)
disp('Model output:'), disp(y)
Sampling time:
Ts =
0.1000
Discrete-time model:
Ad =
1.0494 0.1016
0.9961 1.0494
Bd =
0.0050
0.1016
Random input:
Columns 1 through 7
0.5578 0.3134 0.1662 0.6225 0.9879 0.1704 0.2578
Columns 8 through 10
0.3968 0.0740 0.6841
Model output:
Columns 1 through 7
0.4024 0.5250 0.7038 0.9546 1.3037 1.7898 2.4585
Columns 8 through 11
3.3722 4.6225 6.3318 8.6706
P10.2 Airplane dynamics
A=[-1 1;-7 -.5]; B=[-.1;-5];
C=eye(2); D=[0;0];
AP=ss(A,B,C,D);
disp('Sampling time:'), Ts=.01
APz=c2d(AP,Ts);
APz.y={'AOA','q'};
disp('Discrete-time model:')
Ad=APz.a, Bd=APz.b,
disp('Transfer functions:')
tf(APz)
x=Bd;
f2=@(x,u) Ad*x;
for i=1:length(u), x(:,i+1)=f1(x(:,i),u(i)); end
disp('Model outputs:')
disp('AOA:')
disp(x(1,:))
disp('Pitch rate:')
disp(x(2,:))
Sampling time:
Ts =
0.0100
Discrete-time model:
Ad =
0.9897 0.0099
-0.0695 0.9947
Bd =
-0.0012
-0.0498
Transfer functions:
ans =
From input to output...
-0.001244 z + 0.0007424
AOA: -----------------------
z^2 - 1.984 z + 0.9851
-0.04983 z + 0.04941
q: ----------------------
z^2 - 1.984 z + 0.9851
Sample time: 0.01 seconds
Discrete-time transfer function.
Model outputs:
AOA:
Columns 1 through 7
-0.0012 -0.0036 -0.0018 0.0021 0.0103 0.0276 0.0534
Columns 8 through 11
0.0867 0.1318 0.1924 0.2757
Pitch rate:
Columns 1 through 7
-0.0498 0.0032 0.0316 0.0483 0.1160 0.2324 0.2887
Columns 8 through 11
0.3823 0.5279 0.6928 0.9882
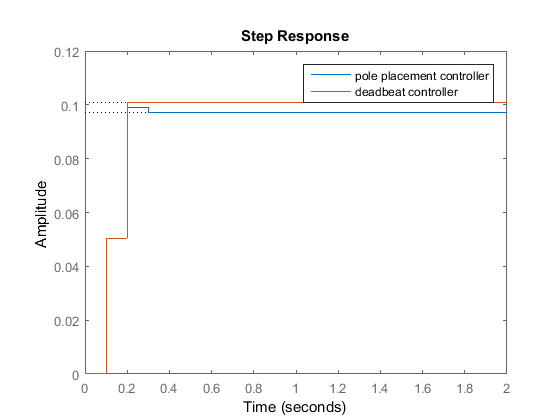
P10.3 DC motor
R=1; L=.01; J=.01; b=.1; k=.02;
A=[R/L -k/L; k/J -b/J]; B=[1/L; 0];
C=[0 1]; D=[0];
DC=ss(A,B,C,D);
Ts=.01;
DCz=c2d(DC,Ts);
disp('Discrete-time model:')
Ad=DCz.a, Bd=DCz.b,
disp('Pole placement controller:')
syms k1 k2 real
Acl=Ad-Bd*[k1 k2];
p=charpoly(Acl);
k=solve(p(2)+2*exp(-1), p(3)-exp(-2),k1,k2);
k=double([k.k1 k.k2])
DC1=DCz;
DC1.a=DCz.a-DCz.b*k;
disp('Deadbeat controller design:')
k=solve(p(2), p(3),k1,k2);
k=double([k.k1 k.k2])
DC2=DCz;
DC2.a=DCz.a-DCz.b*k;
disp('Step responses:')
c=evalfr(DC1,1)/evalfr(DC2,1);
step(DC1, DC2)
legend('pole placement controller','deadbeat controller')
Discrete-time model:
Ad =
2.7179 -0.0330
0.0330 0.9046
Bd =
1.7182
0.0139
Pole placement controller:
k =
1.6057 9.1701
Deadbeat controller design:
k =
1.8968 26.0751
Step responses:
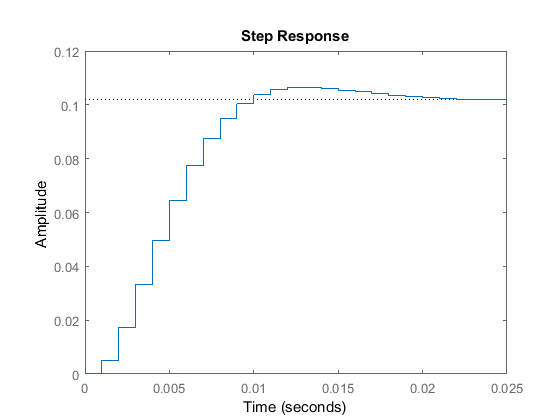
P10.4 Flexible beam
wn=1e2; zi=.05;
A=[0 1; -wn^2 -2*zi*wn]; B=[0; wn]; C=[wn 0];
FB=ss(A,B,C,0);
FBz=c2d(FB,.001)
disp('Controller design:')
k=place(FBz.a,FBz.b,exp(.25*[-1+j -1-j]))
FBz.a=FBz.a-FBz.b*k;
disp('Step response:')
step(FBz)
FBz =
a =
x1 x2
x1 0.995 0.0009934
x2 -9.934 0.9851
b =
u1
x1 4.979e-05
x2 0.09934
c =
x1 x2
y1 100 0
d =
u1
y1 0
Sample time: 0.001 seconds
Discrete-time state-space model.
Controller design:
k =
879.2029 4.3001
Step response:
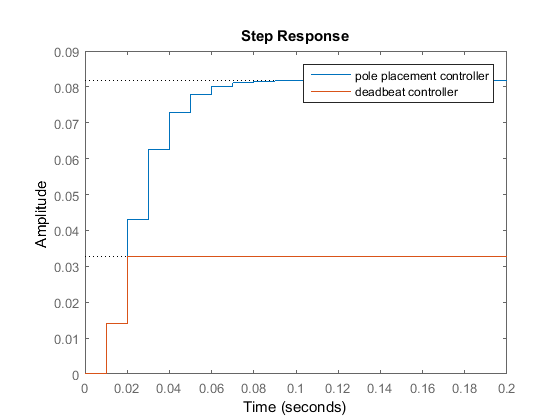
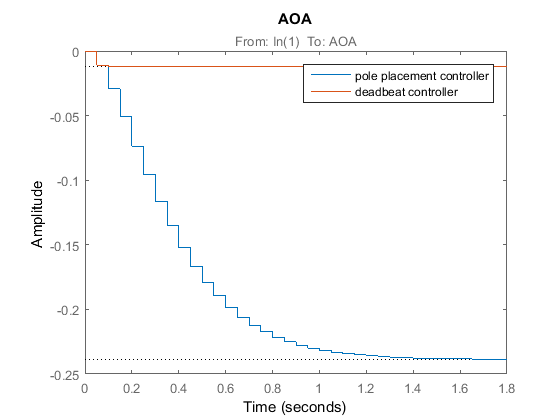
P10.5 Airplane dynamics
A=[-1 1;-7 -.5]; B=[-.1;-5];
C=eye(2); D=[0;0];
AP=ss(A,B,C,D);
AP.y={'AOA';'PR'};
Ts=.05;
APz=c2d(AP,Ts);
Ad=APz.a; Bd=APz.b;
disp('Pole placement controller:')
k=place(Ad,Bd,exp(Ts*[-5+j,-5-j]))
H1=tf({k(1),k(2)},1);
T1=feedback(APz,H1);
disp('Deadbeat controller:')
syms k1 k2 real
Acl=Ad-Bd*[k1 k2];
p=charpoly(Acl);
k=solve(p(2), p(3),k1,k2);
k=double([k.k1 k.k2])
H2=tf({k(1),k(2)},1);
T2=feedback(APz,H2);
disp('Step responses:')
c=evalfr(T1(2),1)/evalfr(T2(2),1);
step(T1(1), T2(1))
title('AOA')
legend('pole placement controller','deadbeat controller')
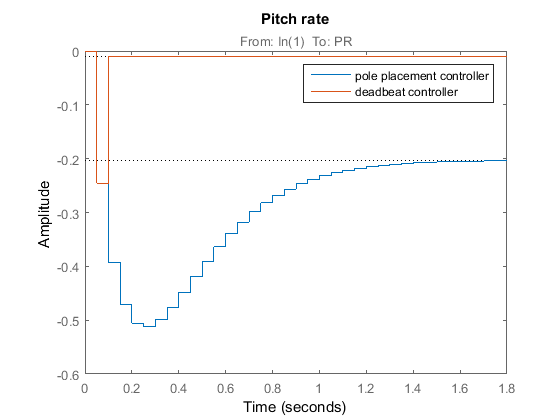
figure, step(T1(2), T2(2))
title('Pitch rate')
legend('pole placement controller','deadbeat controller')
Pole placement controller:
k =
-1.5336 -1.3747
Deadbeat controller:
k =
-77.1633 -4.3400
Step responses:
P10.6 Human postural dynamics
G=tf([10],[1 0 -10]);
G=ss(G);
Ts=.1;
disp('Discrete-time model:')
Gz=c2d(G,Ts);
[Ad,Bd]=ssdata(Gz)
disp('State feedback controller:')
K1=place(Ad,Bd,exp([-4+3*j -4-3*j]))
disp('Deadbeat controller:')
syms k1 k2 real
Acl=Ad-Bd*[k1 k2];
p=charpoly(Acl);
k=solve(p(2), p(3),k1,k2);
K2=double([k.k1 k.k2])
G1=Gz; G1.a=Gz.a-Gz.b*K1;
G2=Gz; G2.a=Gz.a-Gz.b*K2;
step(G1,G2)
legend('pole placement controller','deadbeat controller')
Discrete-time model:
Ad =
1.0504 0.2542
0.4067 1.0504
Bd =
0.2034
0.0403
State feedback controller:
K1 =
7.7127 14.1001
Deadbeat controller:
K2 =
7.6244 13.6464